Made in India for the world

AR SERIES
Designed for the purpose of handling applications such as machine tending, palletising, arc welding, dispensing and material handling among several others, the AR6-8-1200, AR6-16-1600 and AR6X2-04-850 allow for easy configuration to fit your requirements.
Future-readiness:
Our robots deliver simplified usability and with future-ready technology, they are easy to configure and highly adaptable to your specific requirements.
Precision
Our efficient and cost-effective products are designed and developed to guarantee utmost precision and increased productivity in a varied set of Industries.
Enhanced Quality
Our innovative robotic solutions help you simplify various industrial tasks and improve efficiency. Our high quality standards combined with our affordable packages ensure you get your money’s worth.
Modern Equipment
Our products are equipped with contemporary designs to match the new-age technological advancements to ensure best results.
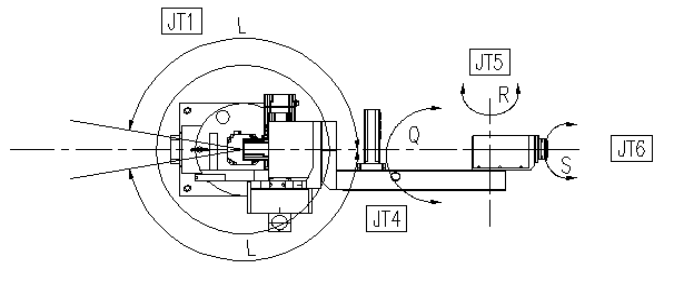
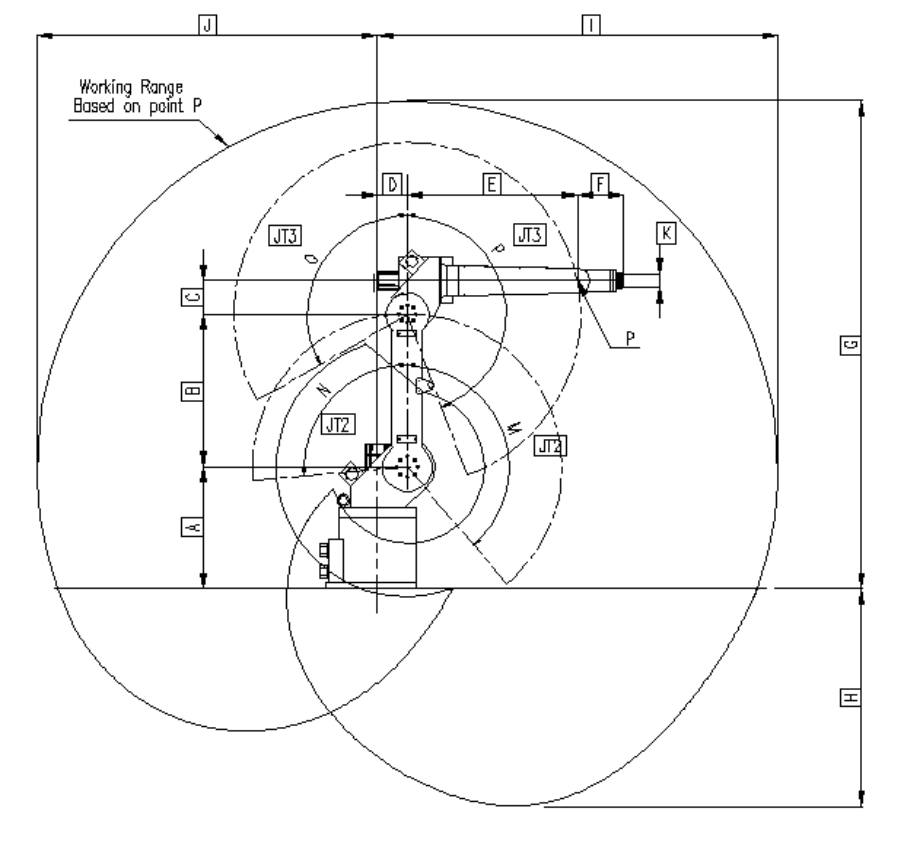
AR6-8-1200
Specifications
| Robots | AR6-8-1200 | |||
| Application | ||||
| Degree of Freedom (axes) | 6 | |||
| Max. payload (kg) | 8 | |||
| Max reach (mm) | 1200 | |||
| Repeatability (mm) | +/-0.05 | |||
| Work envelope (mm) | A | 400 | ||
| B | 500 | |||
| C | 109 | |||
| D | 97 | |||
| E | 550 | |||
| F | 150 | |||
| G | 1600 | |||
| H | 713 | |||
| I | 1,296 | |||
| J | 1,102 | |||
| K | 42 | |||
| Motion Range (0) | Arm rotation | JT1 | L | +/-170 |
| Arm out-in | JT2 | M/N | +140/-95 | |
| Arm out-down | JT3 | O/P | +120/-160 | |
| Wrist swivel | JT4 | Q | +/-180 | |
| Wrist bend | JT5 | R | +/-180 | |
| Wrist twist | JT6 | S | +/-180 | |
| Max Speed (o/s) | Arm Rotation | JT1 | 180 | |
| Arm out-in | JT2 | 180 | ||
| Arm up-down | JT3 | 225 | ||
| Wrist swivel | JT4 | 360 | ||
| Wrist bend | JT5 | 360 | ||
| Wrist twist | JT6 | 360 | ||
| Mass (kg) | 65 | |||
| Installation | Floor, Ceiling,side | |||
| Controller | MC6 | |||
Diagram
Dispensing
Arc Welding
Palletizing
Material Handling
Material Tending
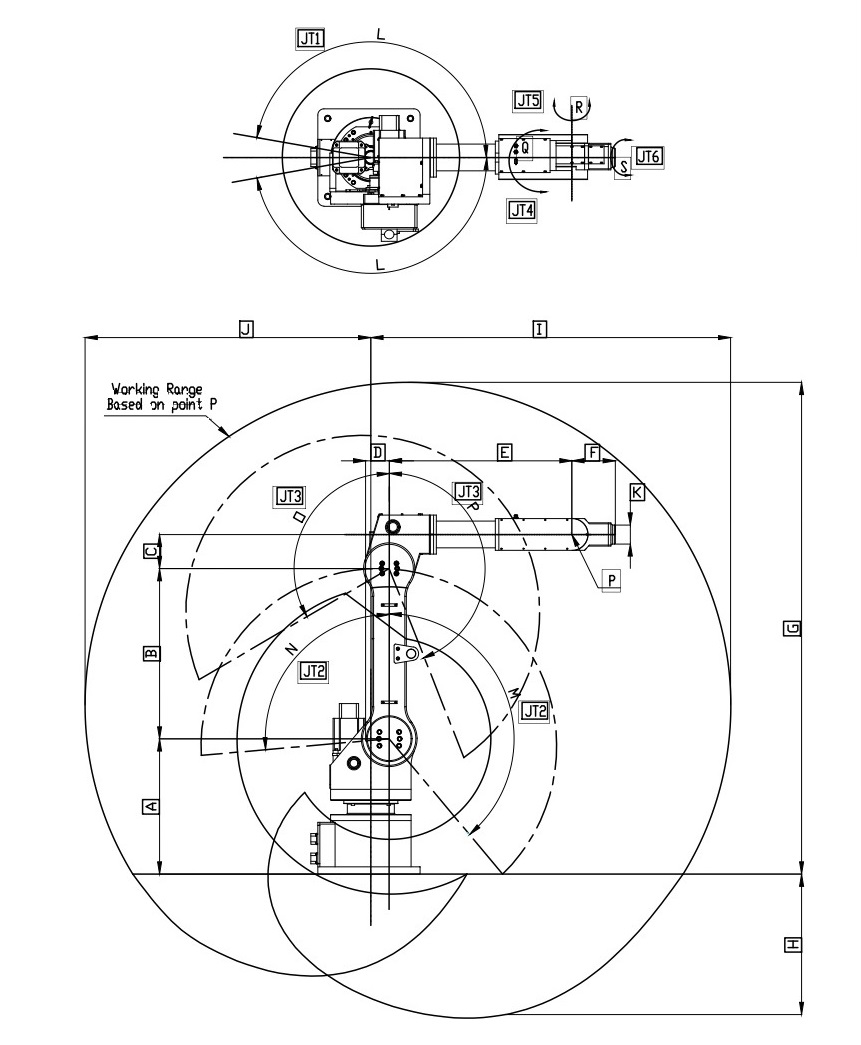
AR6-16-1600
Specifications
| Robots | AR6-16-1600 | |||
| Application | ||||
| Degree of Freedom (axes) | 6 | |||
| Max. payload (kg) | 16 | |||
| Max reach (mm) | 1600 | |||
| Repeatability (mm) | +/-0.05 | |||
| Work envelope (mm) | A | 555 | ||
| B | 700 | |||
| C | 140 | |||
| D | 75 | |||
| E | 750 | |||
| F | 180 | |||
| G | 1600 | |||
| H | 600 | |||
| I | 1500 | |||
| J | 1175 | |||
| K | 50 | |||
| Motion Range (0) | Arm rotation | JT1 | L | +/-170 |
| Arm out-in | JT2 | M/N | +155/-100 | |
| Arm out-down | JT3 | O/P | +130/-165 | |
| Wrist swivel | JT4 | Q | +/-180 | |
| Wrist bend | JT5 | R | +/-180 | |
| Wrist twist | JT6 | S | +/-180 | |
| Max Speed (o/s) | Arm Rotation | JT1 | 180 | |
| Arm out-in | JT2 | 180 | ||
| Arm up-down | JT3 | 225 | ||
| Wrist swivel | JT4 | 360 | ||
| Wrist bend | JT5 | 360 | ||
| Wrist twist | JT6 | 360 | ||
| Mass (kg) | 160 | |||
| Installation | Floor, Ceiling,side | |||
| Controller | MC6 | |||
Diagram
Dispensing
Arc Welding
Palletizing
Material Handling
Material Tending
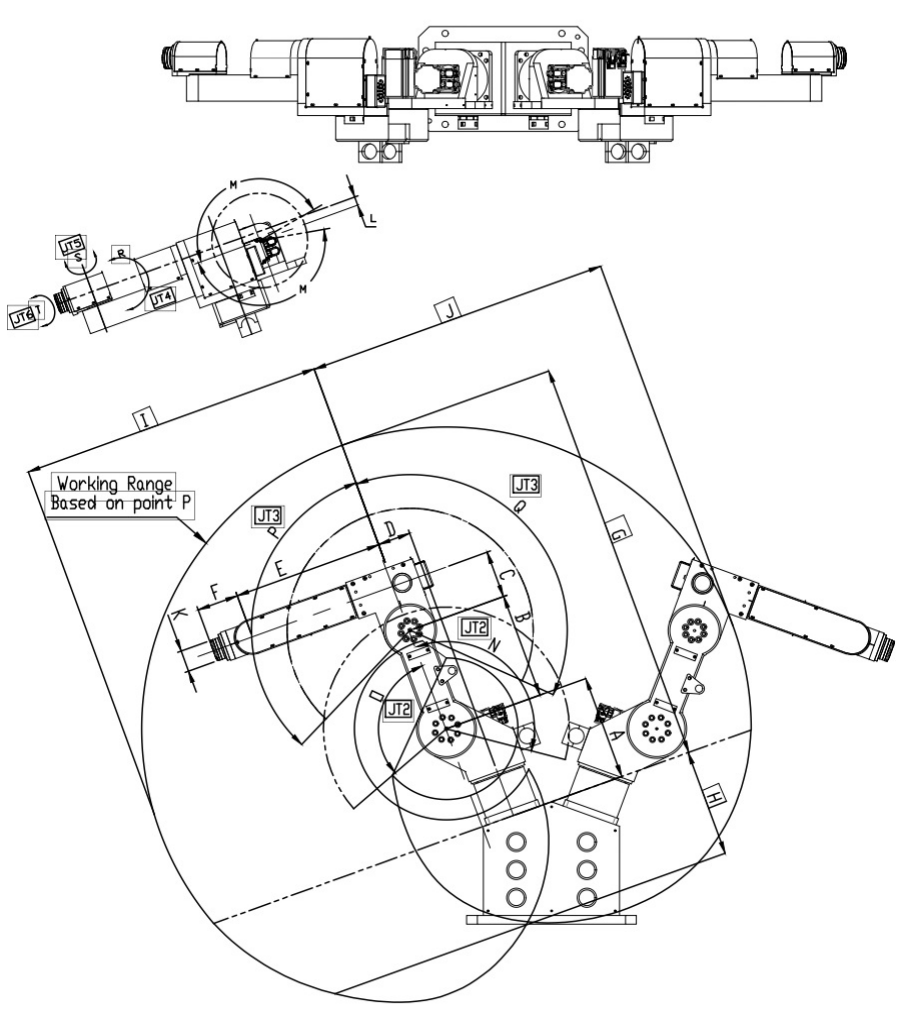
AR6X2-04-850
Specifications
| Robots | AR6X2-04-850 | |||
| Application | ||||
| Degree of Freedom (axes) | 6 + 6 | |||
| Max. payload (kg) | 4 / Arm | |||
| Max reach (mm) | 850 | |||
| Repeatability (mm) | +/-0.05 | |||
| Work envelope (mm) | A | 300 | ||
| B | 300 | |||
| C | 135 | |||
| D | 93 | |||
| E | 427 | |||
| F | 118 | |||
| G | 1150 | |||
| H | 300 | |||
| I | 900 | |||
| J | 800 | |||
| K | 50 | |||
| L | 40 | |||
| Motion Range (0) | Arm rotation | JT1 | M | +/-170 |
| Arm out-in | JT2 | N/O | +155/-100 | |
| Arm out-down | JT3 | P/Q | +130/-165 | |
| Wrist swivel | JT4 | R | +/-180 | |
| Wrist bend | JT5 | S | +/-180 | |
| Wrist twist | JT6 | T | +/-180 | |
| Max Speed (o/s) | Arm Rotation | JT1 | 180 | |
| Arm out-in | JT2 | 180 | ||
| Arm up-down | JT3 | 225 | ||
| Wrist swivel | JT4 | 360 | ||
| Wrist bend | JT5 | 360 | ||
| Wrist twist | JT6 | 360 | ||
| Mass (kg) | 45 | |||
| Installation | Floor, Ceiling | |||
| Controller | MC12 | |||
Diagram
Dispensing
Assembly
Pick & Place
Inspection
Sorting
Material Handling
Polishing
Milling
Grinding
Deburring